1. Prerequisites and Requirements
We will setup the following:
- Kubernetes version:
v1.30.5 - Base Command Manager (BCM) version:
10.24.09 - On Linux OS:
Ubuntu 22.04,Ubuntu 24.04,Rocky Linux 9u3orRHEL 9u3. - On an air-gapped cluster (no internet access at all)
The first instructions are to be executed on a host with Internet Access. The following requirements are in place for this machine:
- OS has to match the airgapped cluster, either:
Ubuntu 22.04,Ubuntu 24.04,Rocky Linux 9u3orRHEL 9u3. BCMpackage repositories are in place.airgap-scriptsdirectory taken from BCM version >=10.24.09.- Internet access
For this reason it could be convenient to take a BCM 10.24.09 Virtual Machine.
2. Prepare air-gapped requirements
When the internet machine has the cm-setup package installed, then the scripts can be found here:
/cm/local/apps/cm-setup/lib/python3.9/site-packages/cmsetup/plugins/kubernetes/airgap-scripts/
Otherwise, the scripts need to be copied to the machine beforehand. In following steps we will assume the cm-setup location for these scripts.
- Add the
airgap-scriptsto thePATHenvironment:
export PATH=$PATH:/cm/local/apps/cm-setup/lib/python3.9/site-packages/cmsetup/plugins/kubernetes/airgap-scripts/
- Install
helmto/usr/local/bin/helmvia https://helm.sh/docs/intro/install/ instructions, or via the helper script that we ship withcm-setup:download_helm_binary.shOptionally, verify thathelmworks:root@internet-host:~# helm version
version.BuildInfo{Version:"v3.15.3", GitCommit:"1a500d5625419a524fdae4b33de351cc4f58ec35", GitTreeState:"clean", GoVersion:"go1.22.4"} - Install
docker
If this is a BCM Head Node, you can runcm-docker-setupand set up docker on the Head Node. Followed by amodule load dockerafter the setup.
Otherwise, follow the instructions from: https://docs.docker.com/engine/install/ Test withdocker psif the deployment is successful. If the output looks as follows, we can proceed with the next step:
root@internet-host:~# docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESPlease note that the docker service might take a few seconds to initialize and start. - Create a working directory, for example
/root/airgapped. And invoke the following scripts within this directory.
mkdir -p airgapped
cd airgapped
download_ubuntu_packages.sh # in case of Ubuntu Linux
download_r9u3_packages.sh # in case of Rocky and RedHat Linux
download_container_images.sh
download_helm_charts.sh
cd ..
tar -czf airgapped.tar airgapped
It’s best to execute them one-by-one to ensure all of them succeed. Note the download scripts all write their output to the current working directory. - Save the
airgapped.tarto some USB stick for example, and make sure we make it available on the active Head Node of the air-gapped cluster.
3. Install air-gapped package requirements
Now that we somehow managed to copy the airgapped.tar file onto the active Head Node of the air-gapped cluster. We can continue with the following steps:
- We extract the file:
tar -xvf airgapped.tarThis should result in anairgappeddirectory, we can change directory to it for the rest of the document, and we will invoke a few scripts from this directory.For Ubuntu systems, please move or copy theairgappeddirectory to/tmp/airgapped. Later we will use apt to install packages on the Head Node, andaptuses the_aptuser, and this user does not have permissions to install deb packages from/root. If we do not do this, we will get “File not found” errors later (in step 3).
We will implement a workaround in the future to make this unnecessary. For now this is needed on Ubuntu systems:mv airgapped /tmp/airgapped
cd /tmp/airgappedNow we will make sure we change our current path to it. Executecd airgappedorcd /tmp/airgapped. - We modify our
PATHenvironment here as well, to make some air gap helper scripts available.
export PATH=$PATH:/cm/local/apps/cm-setup/lib/python3.9/site-packages/cmsetup/plugins/kubernetes/airgap-scripts/ - We will now use install scripts for installing the packages on the Head Node and required software-images. We’ll have to repeat these steps on the secondary Head Node as well (in the case of a BCM HA cluster).
install_ubuntu_packages.sh <software images> # For Ubuntu Linux
install_r9u3_packages.sh <software images> # For Rocky or RHEL 9u3 Linux
Example
For example Ubuntu Linux, with software two software images that will be used for the Kubernetes installation:install_ubuntu_packages.sh /cm/images/k8s-control-plane-image /cm/images/k8s-worker-imageFor example Rocky or RHEL 9u3 Linux with only one software image:
install_r9u3_packages.sh/cm/images/default-image
Repeat both for the secondary Head Node if this is an HA BCM cluster. One way to do it is to copy the files to the secondary, and do the same steps..
4. Install docker and docker registry
The following two wizards can be executed because we already pre-installed packages for in the previous section.
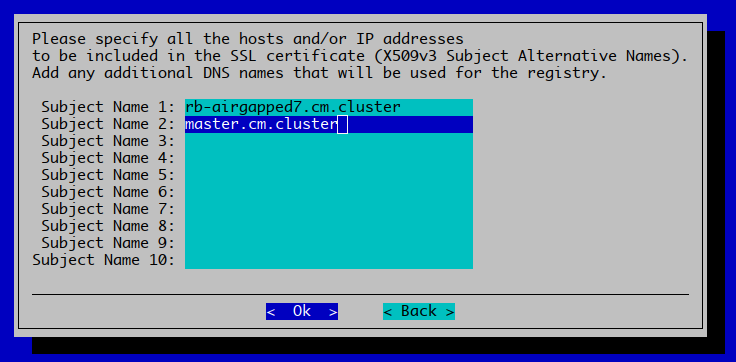
cm-container-registry-setup --skip-packages
We chose the active Head Node. And we choose a custom domain name, or additional Subject Name: master.cm.cluster Choose Save & Deploy. We’ll use this DNS throughout the rest of the document.
cm-docker-setup --skip-packages
We chose the active Head Node only in our case. Choose Save & Deploy.
Test with docker ps if the deployment is successful. If the output looks as follows, we can proceed with the next step:
root@internet-host:~# docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
Please note that the docker service might take a few seconds to initialize and start properly.
5. Push all the container images and Helm charts
Continuing from the airgapped directory, here we will first push all docker images to the docker registry.
push_container_images.sh
Then we will push the helm charts as well.
push_helm_charts.sh
Please note that additional flags are possible for push_helm_charts.sh (see --help)
6. Generate cm-kubernetes-setup.conf
We walk through the entire setup wizard (cm-kubernetes-setup) and once completed, we will choose Save config & Exit, which will allow us to save the cm-kubernetes-setup.conf file to: /root/cm-kubernetes-setup.conf.
We will show all the screens of the wizard next. The main important points to note are:
- In the Operators selection screen: NetQ and Run:AI(*) are currently not supported.
- NVAIE operators are not supported either in combination with airgapped.
((*) Note that this Run:AI operator is for the non self-hosted Run:AI version (SaaS), which is not designed for airgapped.)
If this is clear enough, you can also skip ahead to the next section from here.
The complete Kubernetes setup Wizard
Login to the Head Node and execute cm-kubernetes-setup.
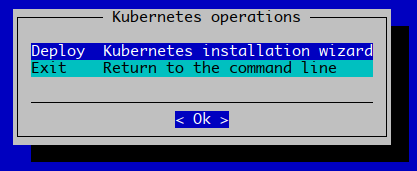
We choose Deploy.
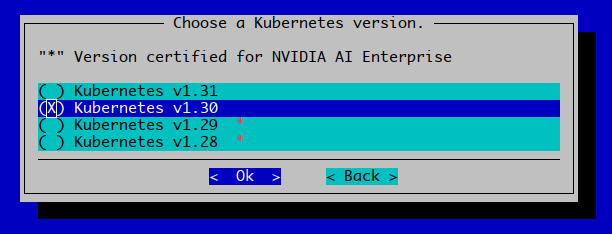 We choose version
We choose version 1.30 here (the default). We need to use the default version in the case we use the bundled scripts.
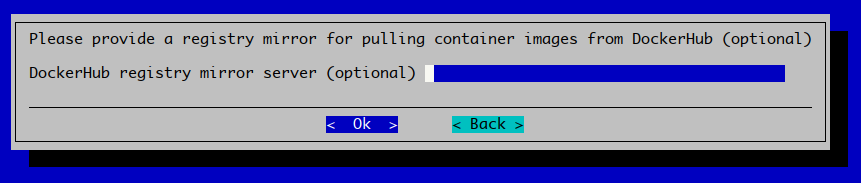
In certain cases, if your company has it, a registry mirror could be configured here. We choose Ok.
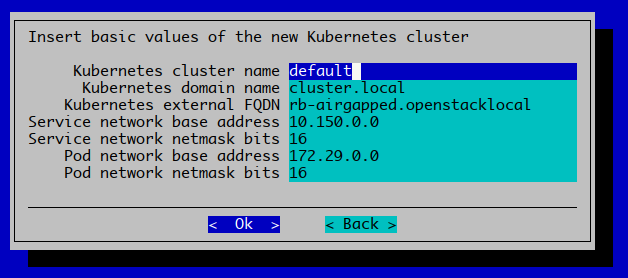
The label of the Kubernetes setup can be changed here, we’ll leave it at default. Typically the FQDN can be set to something more appropriate. Nothing here is specific to airgapped here.
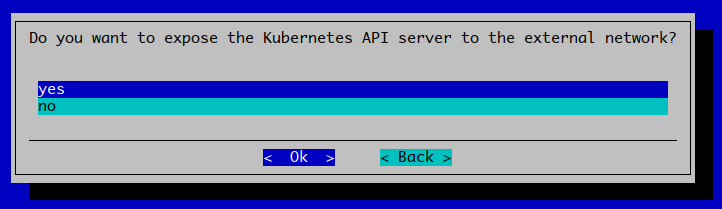 We choose
We choose yes here. The value doesn’t matter for airgapped.
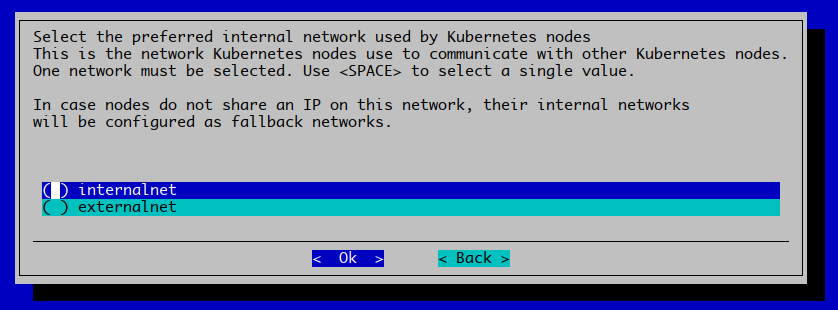
The correct network has to be chosen here. In our example setup, this is the internalnet.
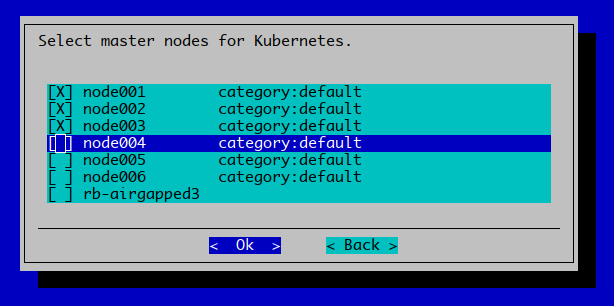
In our example setup we’re choosing node00[1-3] for our Kubernetes control-plane. Head Nodes are also supported.
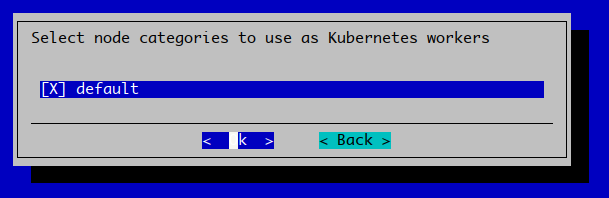
We also choose the default category in our case to become the worker nodes. Since we choose three nodes from this category as control-plane nodes, those will have the control-plane + worker roles, but that means they will effectively only be control-plane nodes. And node00[4-6] will be the workers in our setup.
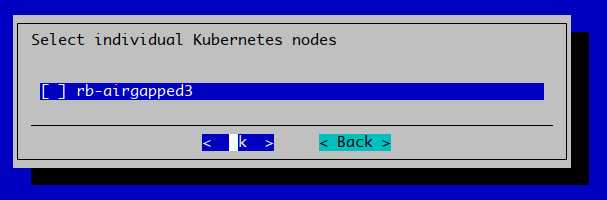
Head Nodes are supported as Kubernetes control-plane or worker nodes, however we didn’t choose the Head Node in our example.
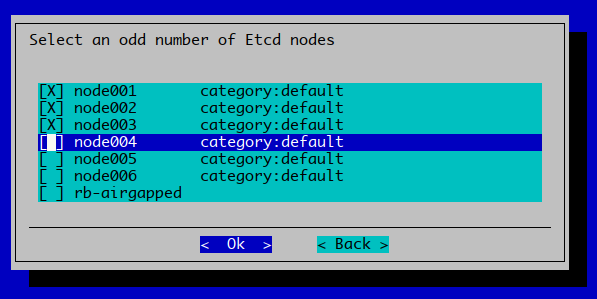
We will setup our three-node Etcd cluster on the nodes that we also designated for the Kubernetes control-plane.
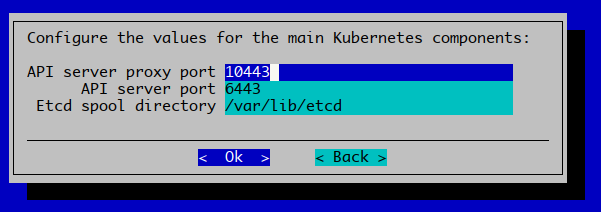
We are not customizing the ports for the Kubernetes API server and proxy (Load Balancer)
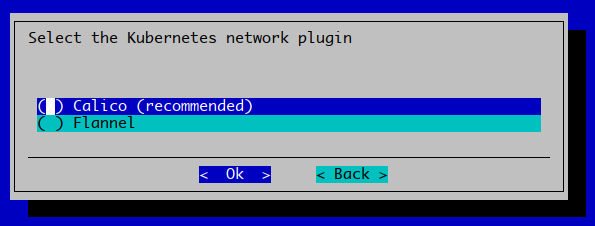
We go ahead with Calico.
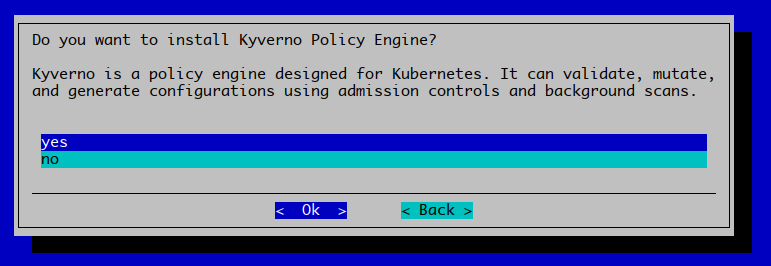
Kyverno is supported with airgapped.
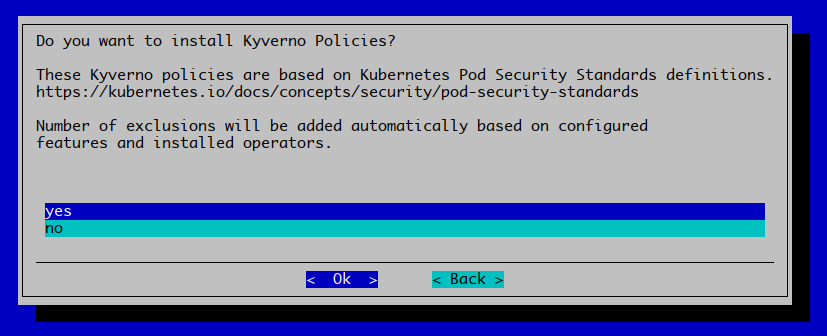
Kyverno policies are as well.
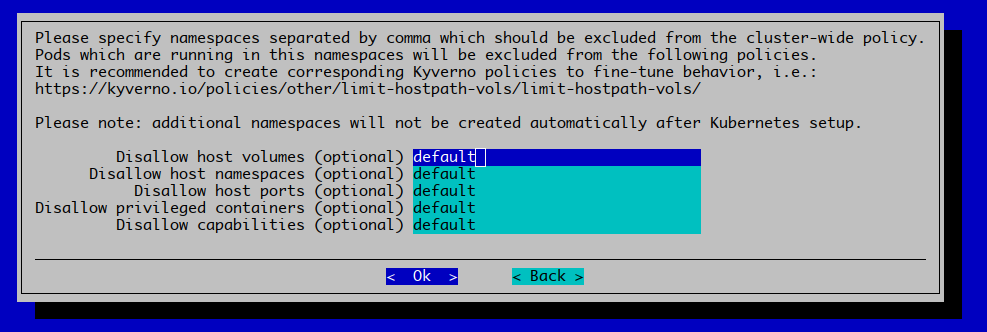
Since we’ve chosen to setup Kyverno, we can already add additional namespaces to be excluded for certain policies.
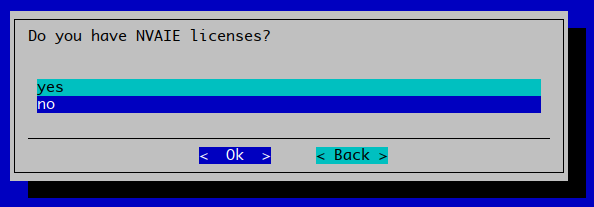
NVAIE is not supported at the time of writing.
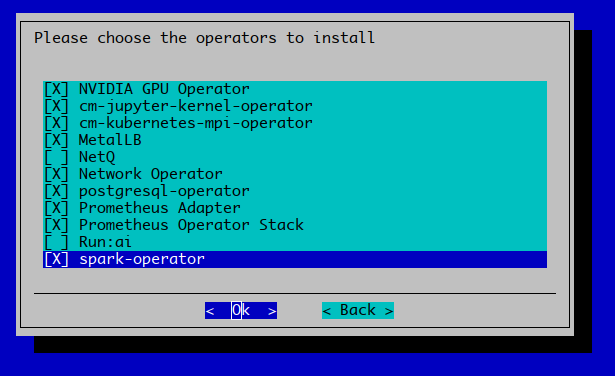
The above list of operators that have been checked are supported in combination with airgapped. As mentioned also at the beginning of this section, NetQ and Run:ai are not supported in combination with airgapped.
These operators are optional, but since for our setup we’ve selected them, we will get additional follow-up screens in the wizard, with additional customization options.
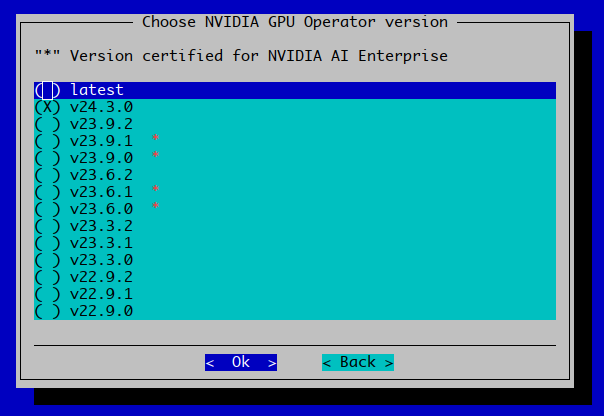 We will have to choose the default version for airgapped (that version might differ from the above screenshot). With manual effort a different version can be installed if necessary.
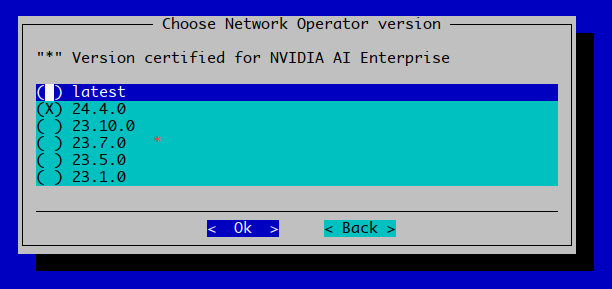
We will have to choose the default version for airgapped (that version might differ from the above screenshot). With manual effort a different version can be installed if necessary.
We will have to choose the default version for airgapped (that version might differ from the above screenshot). With manual effort a different version can be installed if necessary.
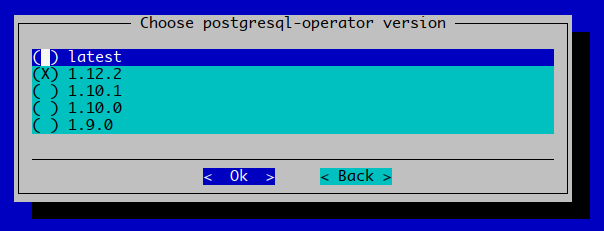
We will have to choose the default version for airgapped (that version might differ from the above screenshot). With manual effort a different version can be installed if necessary.
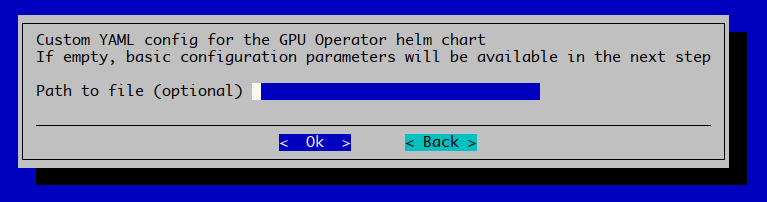
We chose Ok here.
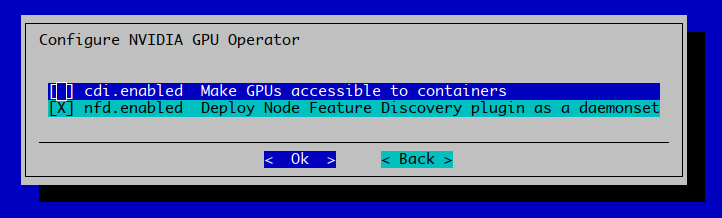
We did not make any changes and chose Ok here. Please note that selecting cdi is also supported.
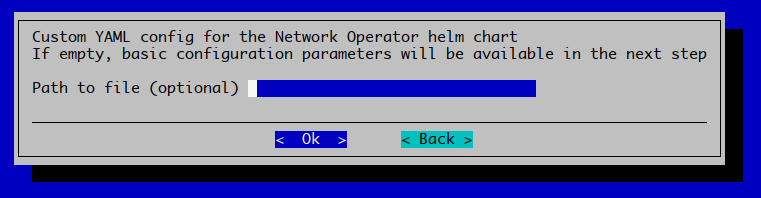
We chose Ok here.
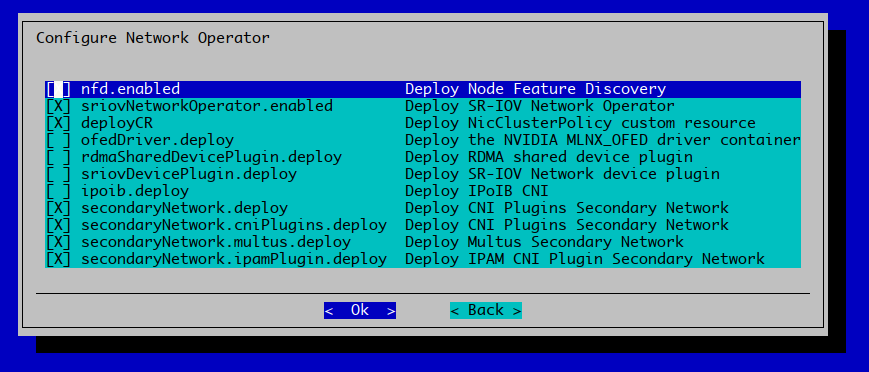
We changed nothing and chose Ok here. Please note that rdmaSharedDevicePlugin, sriovDevicePlugin and ipoib are also supported since 10.24.09. The additional container images are included in the download and push scripts
We did not add any address pools for MetalLB at this point, and chose Ok.
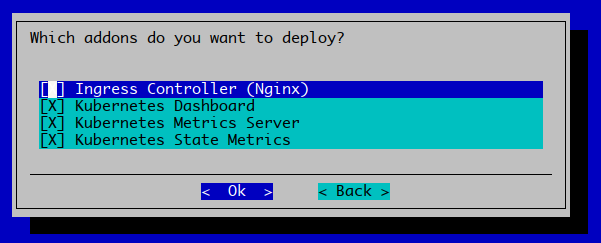
We chose to select all addons and chose Ok. They are optional, but all recommended.
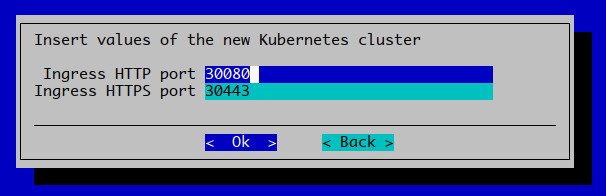
We kept the defaults for the Ingress ports and chose Ok.
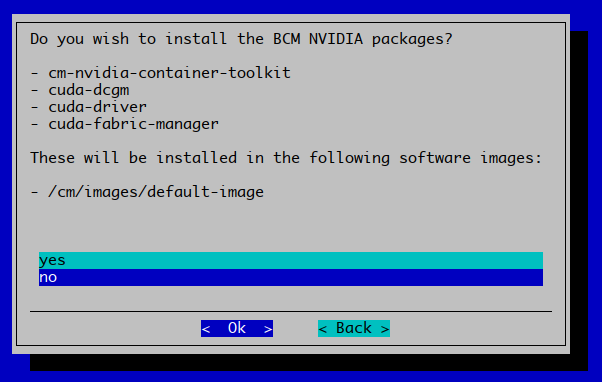
We chose no here, but in principle it shouldn’t matter, the installation of packages is dealt with separately during airgapped installations. We already pre-installed the packages, and whether these were part of that was a choice that has already been made.
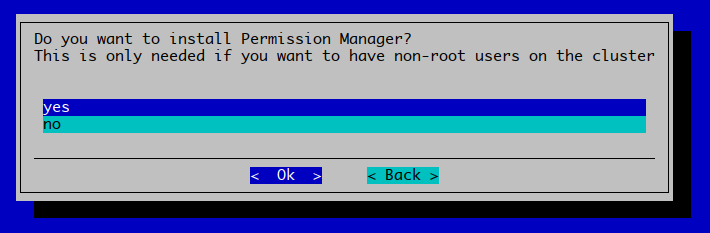
We choose yes here.
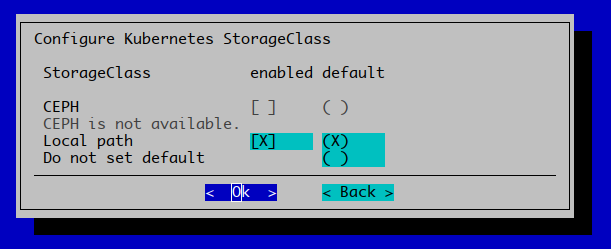
Both CEPH and Local path storage are supported, we kept all defaults and chose Ok.
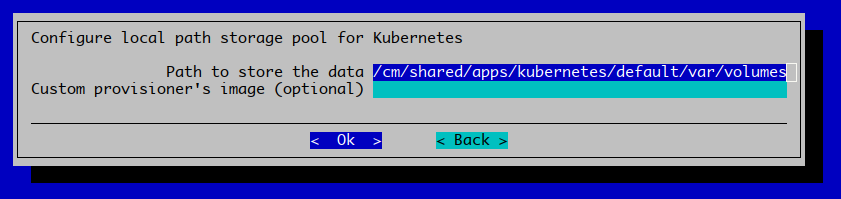
We kept all the defaults and chose Ok.
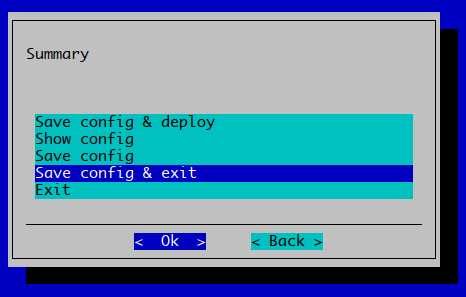
Finally, this is important, we have to choose Save config & exit. Because we need to insert some airgapped-specific settings into the config, before we execute the setup with it.
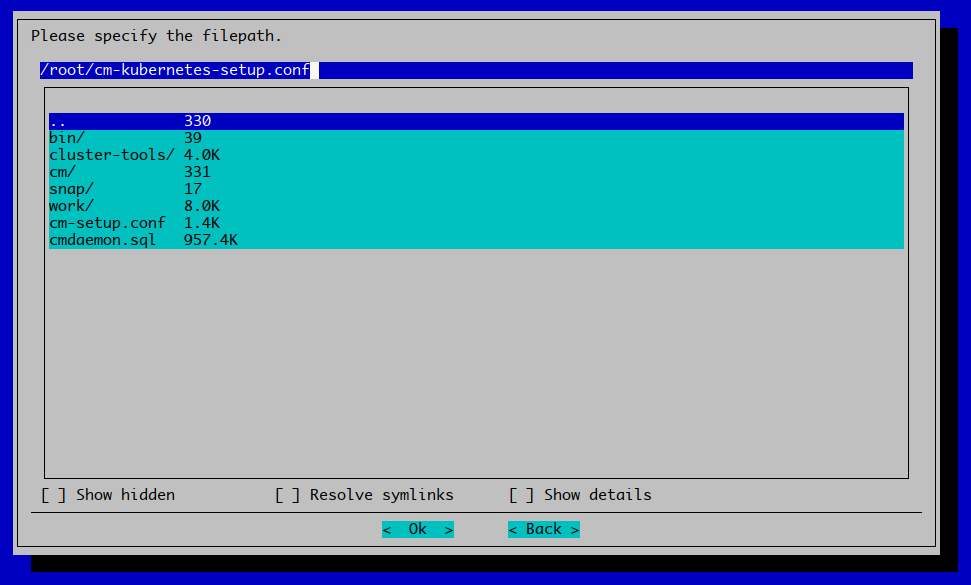 This should be the final screen where the config file is saved. We keep this as
This should be the final screen where the config file is saved. We keep this as /root/cm-kubernetes-setup.conf
Please note, that the setup will not execute, and the wizard will show how the setup can be executed, but before doing that. Please do the next section first!
7. Prepare config for air gapped
Pick your favorite editor and open /root/cm-kubernetes-setup.conf (the file we just generated). Then find this section:
modules: kubernetes: airgap: helm: ca: '' repo: '' registry: ''
And change it to:
modules: kubernetes: airgap: helm: ca: '/cm/local/apps/containerd/var/etc/certs.d/master.cm.cluster:5000/ca.crt' repo: 'oci://master.cm.cluster:5000/helm-charts' registry: 'master.cm.cluster:5000'
8. Deploy Kubernetes
Now finally:
cm-kubernetes-setup -v -c /root/cm-kubernetes-setup.conf
Should result in a working cluster.